Introducción.
-Artículo publicado en el número de enero de 2019 de la Revista RC de INESE.-
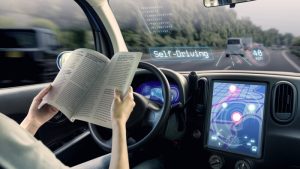
El ya famoso siniestro en que se vio envuelto un vehículo autónomo operado por la compañía Uber no pone sino de manifiesto el hecho de que la implantación definitiva de este medio de transporte está cada vez más cerca.
La deshumanización de la circulación no acarrea forzosamente la desaparición de la siniestralidad, tal y como puso de manifiesto el relativamente reciente atropello mortal antes mencionado, en el que se vio implicado un Volvo XC90 operado por Uber el pasado 19 de marzo de 2018. No es éste el único incidente surgido en las pruebas que se están desarrollando en torno a este tipo de vehículos: tan solo cuatro días antes, se había producido una colisión en la que también resultaba implicado otro vehículo autónomo operado por la misma mercantil. Tampoco es el primer siniestro mortal, aunque sí el más sonado, pues ya en 2016 se produjo el primer fallecimiento, a raíz de la colisión de un Tesla Model S contra un camión. En diciembre de ese mismo año, otro Volvo XC90 en fase de prueba se saltaba un semáforo en fase roja.
Todo ello no hace sino poner de manifiesto la ingente necesidad de regular un sistema de responsabilidad civil específico para este tipo de medio de transporte, ante la obsolescencia del previsto para el tránsito motorizado a consecuencia de la eliminación del factor humano y de la acción de conducción como tal. Es en el momento en que ello ocurra cuando quedará anticuado el concepto de conducción como la conocemos hoy en día, quedando equiparado a lo que hoy denominamos mera circulación.
En este artículo encontrarás:
Algunos conceptos y definiciones necesarias.
Un vehículo autónomo es aquel que, gracias a la integración de un sistema de transporte inteligente, prescinde del elemento humano para su manejo y control, siendo plenamente capaz de circular de un origen a un destino señalado de manera independiente, intercambiando información con agentes externos y adoptando de forma autónoma las decisiones que estime oportunas.
Por Sistema inteligente de transporte o ITS (Intelligent Transportation System), entendemos un conjunto de programas informáticos y sistemas, tanto hardware como software, creados para obtener información acerca de los diferentes elementos existentes en la vía de forma que, una vez procesada y analizada, condiciona la toma de decisiones del propio vehículo, procurando la mayor eficacia en el manejo y control del mismo y, en consecuencia, aumentando la seguridad y eficiencia energética de éste.
Su funcionamiento parte de la base de un sistema operativo, software principal de un sistema informático, el cual soporta el conjunto de programas y aplicaciones que gestionan los recursos del vehículo, y facilita la interacción del usuario con éstos últimos.
La era en la que vivimos se caracteriza por el auge de las denominadas Tecnologías de la Información y Comunicación o TIC, que, aquí entendidas, son un conjunto de herramientas que ayudan a la emisión, recepción y tratamiento de datos en general de la más diversa índole, que suministrará a los sistemas de inteligentes de transporte la información que precisan para gestionarlos y así hacer posible la circulación autónoma.
Otro auge que caracteriza el momento actual es el de la Mobility as a Service o MaaS (Movilidad como Servicio), que hace referencia a un fenómeno en que se supera la conceptualización de vehículo como bien individual cuya propiedad otorga cierto status social, para abrazar la aparición de otros sistemas de movilidad más económicos y eficientes, adoptándose distintos modelos, como pueden ser:
- Economía colaborativa: empresas que acercan a distintas personas con origen y destino común para compartir gastos de transporte (Blablacar, Amovens).
- Servicios de transporte privado: empresas que proporcionan a sus usuarios una red de transporte privado, conectando pasajeros y conductores registrados a través de su plataforma (Uber, Cabify), también conocidas como VTC o Vehículos de Turismo con Conductor.
- Uso temporal de vehículos: empresas que cuentan con vehículos repartidos por la ciudad, y permiten el desbloqueo del mismo de cara a utilizarlo un periodo de tiempo a cambio de un precio (Muving).
Historia del tráfico motorizado.
Resumen histórico de la evolución de los vehículos a motor.
La aparición del primer vehículo propulsado a vapor (que ya contaba con elementos tales como freno de mano, velocidades o volante) en 1769 de la mano de Nicolás Joseph Cugnot, supuso desde un primer momento una alternativa al transporte de la época, sentado sobre la base de carruajes, caballos y carretas. Aunque en sus primeros años no se concebía por la sociedad en su conjunto más que como un “juguete” para clases adineradas, la materialización de la idea de la autopropulsión de los vehículos estaba llamada a cambiar para siempre el modelo social existente.
El invento de Cugnot suscitó, no obstante, una gran fascinación en muchos otros inventores, la cual derivaría en una carrera vertiginosa por desarrollar este tipo de vehículo hasta hacerlo verdaderamente eficiente. Así las cosas, Josef Bozek creó en 1815 una variante propulsada con aceite. Robert Anderson, veinte años después (entre 1832 y 1839), construyó un primer y muy básico modelo de lo que luego se denominarían vehículos eléctricos. Más tarde, en 1860, se patentaría por Etienne Lenoir el primer motor de explosión, el cual funcionaría a base de carbón. Se buscaba la forma de hacer que la autopropulsión de esta clase de vehículos alcanzase mayor velocidad y autonomía en los desplazamientos. Y creo que existe un acuerdo generalizado en que el culmen de esta búsqueda llegó en 1885, cuando Karl Benz creó el primer motor de combustión interna por gasolina, patentado el 29 de enero de 1886. Más tarde se sumaría otro gran conocido, Henry Ford, y lo haría en 1896 con su famoso “cuadriciclo”.

A partir de este momento, además de una mayor eficacia en las prestaciones, dio comienzo otra carrera, ésta orientada a intentar garantizar la seguridad tanto de los usuarios de los vehículos como de los viandantes. Así en 1912-13, Cadillac introduce el arranque eléctrico. En el año 1914 se empieza a incorporar el espejo retrovisor en estos vehículos. Con los amortiguadores hidráulicos se hace lo propio allá por 1933. A mediados de siglo, 1951, Chrysler decide incorporar a sus modelos la dirección asistida. En 1955, la empresa francesa Citröen comienza a incluir de forma masiva los frenos de disco en sus modelos. Tan solo tres años después, Chrysler introdujo otra novedad, el control de crucero. Al año siguiente se crearía por Nils Bohlin el que probablemente sea el elemento de seguridad al que mayor importancia se sigue dando a pie de calle: el cinturón de seguridad. En 1970, Bosch crea el ABS (antiblocksystem) para comercializar a gran escala; la idea llevaba patentada por la mercantil desde 1936, pero de forma genérica. Al año siguiente, se patentaba por Mercedes-Benz el airbag. En 1995 se desarrolló por Bosch en colaboración con Mercedes el control de estabilidad (EPS)… Y así hasta nuestros días.
Ha sido la naturaleza disruptiva de esta invención y el importantísimo impacto que ha tenido en las sociedades modernas, la que ha justificado la necesidad de competir entre los productores por ofrecer mayores prestaciones que sus rivales, garantizando así tanto la eficiencia de sus vehículos como la seguridad y comodidad de sus usuarios. Y como cúspide de este trípode (eficiencia, seguridad y comodidad) se ha erigido el objetivo a alcanzar en la primera mitad del siglo que vivimos por las grandes multinacionales: la completa autonomía y automatización de los vehículos a motor.
Hacia el vehículo del futuro: la aparición del vehículo autónomo.
Siglo XX: Precedentes.
En contra de lo que muchos pudiesen pensar, la búsqueda de un vehículo que pudiese circular sin necesidad de una persona que se encontrase a sus mandos del mismo no es algo que se haya iniciado recientemente por empresas tales como Google o Uber. Existe un precursor, algo así como un “primo lejano” del automatismo que demuestra que es algo ya concebido desde principios del siglo XX.
Si buscamos bien, encontramos precedentes de lo que sería el coche autónomo de hoy en día en la Norteamérica de los años 20, según rezan testimonios que aún perduran en la hemeroteca de diarios tales como The Times, New York Times, The Daily Times, The Washington Herald o Greely Daily Tribune. Tales precedentes no serían otros que vehículos manejados por medio de sistemas de radiocontrol desde un segundo automóvil, vendiéndose como un verdadero espectáculo, recibiendo el calificativo de “coches fantasma” (Phantom auto). Uno de ellos fue desarrollado por el ingeniero Francis P. Choudina, que anteriormente había trabajado para el ejército estadounidense, del cual se conoce que estuvo de gira por Manhattan en 1925, produciéndose en esta demostración otro antecedente del objeto de este escrito: el operador que lo manejaba no pudo evitar su impacto con un tercer vehículo ajeno a la demostración.
Ya en 1935, David H. Keller, psiquiatra y escritor de ficción estadounidense, vaticinó que en el futuro no harían falta conductores en el manejo de los coches. El primer precursor oficial de los vehículos autónomos actuales se presentaría de la mano de Norman Bel Geddes cuatro años después, en 1939, en una feria de muestras patrocinada por General Motors y denominada Futurama. No obstante, el vehículo seguía siendo gobernado desde otro, mediante el sistema de ondas de radio. Habría que esperar hasta 1980 para que unos investigadores de la Universidad de Munich desarrollaran la primera furgoneta guiada por visión artificial. De forma paralela, el mismo año se desarrolló por la agencia DARPA otro proyecto en el que el vehículo se guiaba por radar láser y visión computarizada. En 1987 se produciría otro hito importante, pues se fabricó por HRL un vehículo que llevaba incorporado GPS y era capaz de diseñar su propia ruta, moviéndose por terrenos con obstáculos, el cual llegó a desplazarse nada menos que 600 metros de esta forma. Siguieron desarrollándose este tipo de tecnologías, habida cuenta de su gran potencial, de forma que en 1994 se data la construcción de dos vehículos gemelos, los VaMP y Vita-2 de Daimler-Benz y Ernst Dickmans, los cuales llegaron a alcanzar velocidades de 130 km/h y fueron capaces de circular largas distancias en una autopista de París, siendo mínimas las intervenciones humanas en su manejo.
Comienzos del siglo XXI: Desarrollo.
Desde el año 2000, esta serie de investigaciones, cuales tenían por finalidad la génesis de un vehículo completamente autónomo, derivan en una nueva carrera en el mundo de la fabricación de vehículos.
Las mismas han ganado peso tanto en su vertiente cuantitativa como en la cualitativa, es decir, con el tiempo han ido coexistiendo cada vez más proyectos diferentes, y éstos han contado con cada vez mayor financiación. Esto se hizo notoriamente visible en 2004-2005, cuando DARPA, la Agencia de Proyectos de Investigación Avanzados de Defensa de los Estados Unidos, decidió proceder a la organización de dos carreras en las que aseguraba un importante premio o recompensa al que consiguiese circular un vehículo sin intervención humana durante una determinada distancia en el menor tiempo posible. En 2007, la agencia repitió el proceso. A modo de ejemplo acerca de la importancia de este concurso, el ganador de la edición de 2005 (un laboratorio de electrónica de la Universidad de Stanford) sería el próximo director del proyecto de vehículo autónomo de Google.
Situación actual.
La primera clasificación de niveles de automatización de los vehículos se realizó en 2013 por la agencia NHTSA (National Highway Traffic Safety Administration), dividiéndolos en 5 niveles (1-5) según el número de funciones que el vehículo pudiese realizar de forma autónoma.
Al año siguiente, la SAE (Society of Automotive Engineers) realizó paralelamente su propia clasificación, denominándola “Standard J3016”, la cual dividía en 6 los niveles de automatización de los vehículos (0-5), atendiendo a dos variables: De un lado, los tipos de usuarios de tales vehículos; de otro, los aspectos clave en la conducción.
En lo concerniente a la primera variable, parte de la base de la existencia de cuatro tipos diferentes de usuarios del vehículo, pues, junto a los ya conocidos conductor y pasajero, se situarían el usuario de respaldo y el dispatcher. En cuanto al “usuario de respaldo”, se denomina así a la persona que viaja en el vehículo y que debe estar preparada para, ante un eventual fallo del sistema, tomar los mandos del mismo y hacerse con el control de éste. El “dispatcher” por su parte sería algo así como un gestor, aquella persona cuya actuación se desarrolla fuera del vehículo y se limita única y exclusivamente a verificar la disponibilidad y el correcto funcionamiento del vehículo o, a lo sumo, programar el recorrido que el vehículo ha de realizar hasta recoger al usuario a transportar.
En relación a los aspectos clave en la conducción, discierne cuatro aspectos fundamentales, que serían los siguientes: el “movimiento”, que se desdobla a su vez en longitudinal (control del acelerador y del freno) y lateral (control de la dirección); la “detección y respuesta de elementos, obstáculos y/o eventualidades” que puedan tener lugar mientras circula el vehículo; el “respaldo de la conducción”, que determina quién y cómo toma el control del vehículo en caso de que éste vea suspendida su conducción autónoma, bien por fallo del sistema o bien por la pérdida de las condiciones óptimas de funcionamiento; y las “condiciones de funcionamiento del sistema de conducción”, que también ve desdoblada su naturaleza, pudiendo distinguirse entre condiciones de visibilidad o localización geográfica del vehículo.
Así las cosas, teniendo en cuenta lo anteriormente dispuesto, la clasificación que la “Standard J3016” realiza sería la siguiente:
- Nivel 0: estarían en este nivel los vehículos que carecen de un sistema de conducción automatizada.
- Nivel 1: en este nivel se sitúan los vehículos que cuentan con asistentes en la conducción, como pueden ser el control de crucero y determinadas tecnologías que sirven para mantener el vehículo en su carril.
- Nivel 2: en este escalón tenemos a los coches semiautónomos, aquellos en los que el conductor puede pasar cierto tiempo sin necesidad alguna de tocar el volante ni los pedales. El vehículo posee autonomía casi total para efectuar los movimientos tanto longitudinales como laterales.
- Nivel 3: el vehículo controla los aspectos fundamentales relativos al movimiento (longitudinal y lateral) y a la detección y respuesta ante eventualidades u obstáculos que pudieran surgir. Es decir, en determinadas condiciones consideradas óptimas, puede el vehículo actuar de forma autónoma, pasando el conductor a hacer las veces de lo que antes denominábamos usuario de respaldo, es decir, ha de estar alerta por si hubiera de intervenir.
- Nivel 4: se encuentran aquí los vehículos que cuentan con un sistema que conlleva una automatización completa de la conducción. Cuentan con un sistema de respaldo que entrará en juego en caso de fallo del sistema principal, lo que conlleva la desaparición del concepto de conductor, ni siquiera para intervenir en caso de fallo. No obstante, el funcionamiento del sistema sigue estando limitado a ciertas condiciones, cuya ausencia podrá acarrear que el vehículo no pueda seguir circulando.
- Nivel 5: es el nivel máximo, aquel en el que se situarían los vehículos con un sistema de automatización total y completa, que controle la totalidad de movimientos y reconozca cualquier obstáculo o eventualidad, estando preparado para tomar la decisión más correcta en cualquier situación y/o circunstancia, de modo que el correcto funcionamiento no se encuentra condicionado a nada. Cuenta también con un sistema de respaldo para entrar en juego en caso de fallo del sistema operativo principal.
Visto lo anterior, solo podría predicarse la circulación plenamente autónoma y automatizada de los dos últimos niveles de la escala, de modo que podrían estos vehículos circular de forma completamente independiente, desapareciendo así la figura del conductor, aspecto este último, que cuando se materialice en la realidad, acarreará por consiguiente la desaparición también del concepto de conducción y, por tanto, afectando a la base del criterio de imputación en el sistema de responsabilidad civil establecido por la legislación vigente para el tránsito motorizado.
Consecuencias de la ausencia de conductor.
La desaparición del factor humano en la circulación de vehículos motorizados hace que se tambaleen los cimientos del sistema de responsabilidad civil actual previsto para este tipo de transporte, dado que el artículo 1 del Real Decreto Legislativo 8/2004, de 29 de octubre, por el que se aprueba el Texto Refundido de la Ley sobre Responsabilidad Civil y Seguro en la Circulación de Vehículos a Motor (en adelante, LRCSCVM) resulta claro cuando dispone que:
“El conductor de vehículos a motor es responsable, en virtud del riesgo creado por la conducción de estos, de los daños causados a las personas o en los bienes con motivo de la circulación.”

La norma funde como algo inseparable los conceptos de vehículo y conductor, de modo que la circulación de un vehículo a motor va a depender siempre de que haya una persona a sus mandos, manejándolo y controlándolo en todo momento, y así lo confirma la Dirección General de Tráfico. En este sentido, no aclara si el manejo ha de llevarse a cabo desde el interior del vehículo o puede también hacerse desde el exterior del mismo, sin perjuicio de que esto último, sin autorización, pueda ser sancionable. En el plano internacional, la Convención de Viena sobre circulación por carretera tampoco contempla este punto, estableciendo la obligación de que el conductor gobierne el vehículo en todo momento.
Lo que sí resulta claro, es que la legislación vigente no concibe el hecho de que pueda el propio vehículo tomar sus propias decisiones sin necesidad alguna del elemento humano. Es por ello que la entrada en escena del conductor virtual plantea un nuevo escenario que merece ser objeto de análisis.
Cambio en la causa inmediata del siniestro.
La capacidad de valorar las posibles opciones y tomar las decisiones se transferirá del conductor-humano al conductor-sistema operativo, un “robot” si prefiere denominarse de esta forma, que no deja de ser un objeto, aunque inmaterial. Por tanto, ya no tomará las decisiones un humano, sino un objeto. Se descarta, por consiguiente la posibilidad de que un accidente pueda producirse por una actitud culposa o negligente de la persona que va a los mandos del vehículo, tal y como sucede hoy en día.
La causa inmediata del accidente de circulación pasará entonces de ser una acción u omisión culposa de la persona que va a los mandos a ser un fallo en alguno de los elementos de los sistemas inteligentes de transporte: el sistema operativo, los sensores o radares del vehículo, el sistema de geolocalización, los elementos inteligentes existentes en la vía…
Así pues, pasamos de hablar de culpa del conductor a “culpa” (coloquialmente hablando) del propio vehículo, y en concreto, del defecto que el mismo adolece y que ha provocado el siniestro. Por mucho que se desarrolle la inteligencia artificial, no se puede imputar la responsabilidad a un objeto que carece de personalidad jurídica, por tanto, no será posible identificar al responsable jurídicamente hablando con el responsable en términos coloquiales, de modo que el primero se refiere a quien sea imputable la existencia del defecto y, el segundo, al defecto mismo.
Cambio en el criterio de imputación de la responsabilidad.
Actualmente, la responsabilidad civil derivada de la ocurrencia de un accidente de tráfico es una responsabilidad subjetiva o por culpa, aunque muy objetivada con el desarrollo histórico, la cual encuentra su fundamento en la acción u omisión culposa o imprudente del conductor del automóvil, conducta que puede llegar incluso a ser dolosa en casos extremos. La falta de sujeto implicará automáticamente que no podamos hablar de acción u omisión y, por ende, tampoco tildar de culposas, imprudentes o dolosas tales conductas por inexistentes.
Como hemos adelantado, el siniestro pasará a tener como causa el fallo en alguna de las piezas o el error en alguno de los elementos que puedan componer los sistemas de transporte inteligente; bienes fabricados y puestos en circulación por entidades mercantiles para su utilización, tanto por particulares como por empresas o por la propia Administración. En tal sentido, la disposición adicional 4ª R.D. 662/2012, de 13 de abril, por el que se establece el Marco para la Implantación de los Sistemas Inteligentes de Transporte (SIT) en el Sector del Transporte por Carretera y para las Interfaces con otros Modos de Transporte, ya ha previsto de forma prematura el sistema de responsabilidad aplicable al caso:
“La responsabilidad, en lo referente a la implantación y el uso de aplicaciones y servicios de los sistemas inteligentes de transporte (SIT), se regulará de acuerdo con lo previsto en el texto refundido de la Ley General para la Defensa de los Consumidores y Usuarios y otras leyes complementarias, aprobado por el Real Decreto Legislativo 1/2007, de 16 de noviembre, sin perjuicio de las competencias de las Comunidades Autónomas en la materia.”
 Como podemos observar, el legislador se está refiriendo de forma exclusiva a la responsabilidad del productor o el prestador del servicio, que forzosamente habrá de entrar en juego en caso de que fallen las piezas, aplicándose en tal caso el Real Decreto Legislativo 1/2007, de 16 de noviembre, por el que se aprueba el Texto Refundido de la Ley General para la Defensa de los Consumidores y Usuarios y otras leyes complementarias (en adelante, TRLGDCU), que es la norma encargada de transponer al ordenamiento jurídico español la Directiva 85/374/CEE del Consejo, de 25 de julio de 1985, relativa a la aproximación de las disposiciones legales, reglamentarias y administrativas de los Estados Miembros en materia de responsabilidad por los daños causados por productos defectuosos. Pero resulta llamativo que el precepto obvia por completo la otra cara de la moneda, la cual resulta esencial en lo que a sistemas inteligentes de transporte se refiere: el propio transporte, la circulación de los vehículos que de ellos se sirvan.
Como podemos observar, el legislador se está refiriendo de forma exclusiva a la responsabilidad del productor o el prestador del servicio, que forzosamente habrá de entrar en juego en caso de que fallen las piezas, aplicándose en tal caso el Real Decreto Legislativo 1/2007, de 16 de noviembre, por el que se aprueba el Texto Refundido de la Ley General para la Defensa de los Consumidores y Usuarios y otras leyes complementarias (en adelante, TRLGDCU), que es la norma encargada de transponer al ordenamiento jurídico español la Directiva 85/374/CEE del Consejo, de 25 de julio de 1985, relativa a la aproximación de las disposiciones legales, reglamentarias y administrativas de los Estados Miembros en materia de responsabilidad por los daños causados por productos defectuosos. Pero resulta llamativo que el precepto obvia por completo la otra cara de la moneda, la cual resulta esencial en lo que a sistemas inteligentes de transporte se refiere: el propio transporte, la circulación de los vehículos que de ellos se sirvan.
Con todo, y dado que se ha puesto de manifiesto el punto de partida, el criterio de imputación será el defecto de seguridad, por violar el producto el principio general de seguridad dispuesto en el artículo 11 de la norma:
“Los bienes o servicios puestos en el mercado deben ser seguros”
El apartado siguiente define el concepto de “seguridad”, considerando seguros aquellos que no conlleven riesgo alguno, más allá del mínimo inevitable, para la salud de las personas, siempre y cuando se haga un uso previsible del bien o servicio.
En este sentido, el fundamento será el de una responsabilidad civil objetiva o por riesgo, basada en el defecto de seguridad del vehículo, en relación al deber de garantizar la seguridad a la víctima o perjudicado frente a las actividades generadoras de riesgo y susceptibles de causar un daño. Esta responsabilidad objetiva no es absoluta, ni en lo relativo a la circulación del vehículo ni en lo concerniente al vehículo como producto defectuoso pues las diferentes legislaciones aplicables contemplan determinadas causas de exoneración.
No obstante, resulta oportuno aclarar que lo dispuesto en la disposición adicional indicada en relación a la responsabilidad civil por productos defectuosos será de principal aplicación en cuanto a la acción de repetición que ostentará aquel al que podamos imputar la responsabilidad en primer lugar, de forma directa, por el hecho de la mera circulación del vehículo. Ello obedece a que, en la inmensa mayoría de los casos, al perjudicado le resultará infinitamente más cómodo dirigirse frente a la persona que pone en circulación el vehículo o la entidad aseguradora que cubra los daños causados por éste.
La responsabilidad civil derivada de la circulación del vehículo autónomo.
Con independencia a cualquier eventual responsabilidad que pueda imputársele al fabricante por los defectos o vicios que pueda adolecer el vehículo, resulta del todo obvia la necesidad de referirse a la responsabilidad derivada de la propia circulación del vehículo autónomo que pueda errar en su funcionamiento. Y ello porque rara vez coincidirá el productor con la persona que ponga en circulación el vehículo, y ante la ausencia de conductor a la que ya se ha hecho referencia, cabe plantearse la cuestión de a quién habrá de imputarse la responsabilidad por los daños producidos, así como el título en virtud del cual se le imputa la misma.
Ámbito de aplicación.
El sistema de responsabilidad civil que recoge el texto refundido está orientado a un campo que se caracteriza por la coexistencia de dos elementos que han de manifestarse de forma conjunta para que sea de aplicación lo que el mismo dispone: por un lado, la participación de un vehículo a motor; y por otro, la producción de un daño a consecuencia de un hecho de la circulación.
Ambos elementos vienen definidos en el cuerpo del Real Decreto 1507/2008, de 12 de septiembre, por el que se aprueba el Reglamento del seguro obligatorio de responsabilidad civil en la circulación de vehículos a motor (en lo sucesivo, el Reglamento).
El concepto de vehículo a motor.
Se entiende por “vehículo” aquel medio de transporte de personas o cosas. No obstante, resulta preciso distinguir entre aquellos vehículos con y aquellos sin motor, de cara a determinar el ámbito de aplicación de la norma reguladora de la responsabilidad civil a la que se alude.
Así, la noción de “vehículo a motor” viene definida en el artículo 1 del Reglamento, según el cual, hemos de referirnos a aquel tipo de vehículo destinado a su circulación por la superficie terrestre, impulsado a motor, y que requiera para la circulación de autorización administrativa. La concepción abarca tanto coches como motocicletas, ciclomotores o vehículos especiales. Incluso se entienden dentro de la misma los remolques o similares cuya masa máxima autorizada supere los 750 kg., estando excluidos en caso contrario.

Otras exclusiones expresas que el precepto dispone son cualesquiera vehículos que circulen por vías dispuestas al efecto, además de aquellos vehículos que puedan tener la consideración de juguetes.
El sistema de responsabilidad civil resulta, por tanto, aplicable a los vehículos que, no incurriendo en las exclusiones tasadas que el artículo dispone, reúnan los tres requisitos indicados:
- Circulación por la superficie terrestre: Al realizar el artículo esta referencia, se excluye tácitamente aquellos que se desplacen por mar o aire, de modo que las embarcaciones, aviones, aeroplanos y demás, quedarán fuera, pese a disponer de motor y precisar autorización administrativa para su manejo.
- Impulso a motor: la Real Academia lo define como aquella “máquina destinada a producir un movimiento a expensas de otra fuente de energía”. A los efectos que nos ocupan, se trata de vehículos autopropulsados por medio de motores, que bien pueden consumir energías fósiles, eléctrica, u otras por el estilo.
- Autorización administrativa: es preciso que el vehículo requiera una autorización administrativa para su circulación. Estamos acostumbrados a ver cómo para poder circular con uno de estos vehículos de manera acorde a Derecho se exige contar con permiso de circulación, tarjeta de inspección técnica en vigor, placas de matrícula y seguro obligatorio, además de permiso de conducción en vigor de la persona que se encuentre a los mandos. Este último requisito es la causa del vacío legal con el que se ha potenciado el auge de los patinetes eléctricos que tanto vemos en las calles últimamente.
Verificado el cumplimiento de los requisitos por parte del vehículo, habrá que confirmar que el suceso durante el que produjo el siniestro fuese encuadrable dentro del concepto de “hecho de la circulación”.
El concepto de hecho de la circulación.
Como se ha advertido anteriormente, ambos elementos tienen que concurrir de forma simultánea o cumulativa, por lo que, en caso contrario, nos encontraremos fuera del ámbito de aplicación de la LRCSCVM y su Reglamento.
El artículo 2 del Reglamento se encarga de acotar lo que se debe entender por “hecho de la circulación”, entendiendo que son los aquellos que se derivan de los riesgos creados por el manejo de vehículos a motor. Pero no todo manejo del vehículo ha de ser entendido como hecho de la circulación, puesto que el precepto dispone también un criterio de finalidad, según el cual, el vehículo debe servir al traslado de personas y/o mercancías, y no a otras actividades como pudiere ser considerado un tractor en relación a la agricultura; además, también recoge un criterio geográfico para entender que se ha producido el mismo: el hecho ha de tener lugar en garajes, aparcamientos, vías y/o terrenos públicos o privados aptos para la circulación, ya sean vías urbanas o interurbanas, así como aquellas vías que, sin tener tal consideración, puedan entenderse de uso común.
Tal y como dispone BADILLO ARIAS, la concepción que tratamos se desdobla en la necesidad de atender a tres factores fundamentales: el primero atenderá al vehículo utilizado, de modo que habremos de ver si se cumple lo que el artículo 1 anteriormente citado requiere; el segundo, a la actividad llamada a desempeñar el propio vehículo, que no ha de ser otra que el traslado de personas y/o mercancías; y el tercero, por su parte, tendrá en consideración el lugar donde se produce el evento lesivo.
En cuanto al criterio funcional, la actividad debe ser el transporte, siendo que los vehículos afectos a otras finalidades distintas están excluidos del ámbito de aplicación de esta norma. No faltan sentencias en las que se entiende que no se dan las circunstancias para entender subsumido el evento dentro del concepto de hecho de la circulación, rechazando las mismas de esta forma las pretensiones indemnizatorias del damnificado.
Por otro lado, en relación al criterio geográfico, no plantean grandes problemas las vías o terrenos aptos para la circulación. En cambio, pese a su inclusión, traen mayor controversia aquellos siniestros ocurridos en garajes o aparcamientos, así como los que se producen en vías o terrenos no aptos para la circulación según las autoridades pertinentes. En cuanto a los primeros, han de entenderse dentro del ámbito de aplicación aquellos siniestros que se produzcan con ocasión de la conducción, y no aquellos otros que tengan lugar en un ámbito ajeno a ésta.
En relación a los segundos, la Sentencia del Tribunal de Justicia de la Unión Europea de 20 de diciembre de 2017 se pronuncia sobre el tema, a petición de la Audiencia Provincial de Albacete, lo cual ha supuesto un cambio de paradigma. En concreto, indica que la cobertura no puede quedar limitada a que la circulación de los vehículos se lleve a cabo por la vía pública considerada apta para la circulación, sino que debe comprender cualquier utilización que sea conforme al uso normal de los mismos. Ello lo hace poniendo en relación el Reglamento con la Directiva 2009/103, disponiendo literalmente que:
“ninguna disposición de la Directiva limita el alcance de la obligación de seguro ni de la protección que esta obligación pretende conferir a las víctimas de accidentes causados por vehículos automóviles, a los casos de utilización de estos vehículos en determinados terrenos.”

Por tanto, desde el pasado mes de diciembre de 2017, parece claro que la aseguradora tendrá que prestar asistencia conforme a la póliza contratada sin que pueda tener en cuenta la aptitud o no del terreno para la circulación, siempre que el uso del vehículo se lleve a conforme a estándares dentro de la normalidad.
El nuevo sistema de responsabilidad civil.
Sin perjuicio de lo dispuesto en cuanto a la reclamación al productor por los defectos de que adoleciese el vehículo en el momento de su puesta en circulación, nos hemos de referir a los cambios que se vislumbran en cuanto al sistema de responsabilidad civil previsto para el uso y circulación de vehículos a motor.
En este sentido, parece realista indicar que las principales causas de ocurrencia de siniestro ocasionado por la circulación del vehículo autónomo podrán ser: (1) un defecto o fallo en alguno de los elementos que integran el vehículo, tanto hardware como software, imputable al productor o a la persona obligada al mantenimiento del vehículo; (2) un defecto o fallo en alguno de los elementos que integren los sistemas inteligentes de transporte existentes en la vía; y (3) fuerza mayor, entre otros.
Descartada la fuerza mayor por su carácter exonerador, nos encontramos en el terreno de los defectos o fallos de las piezas y mecanismos que integran tanto el vehículo como los demás sistemas inteligentes de transporte, y no hemos de olvidar, en este punto, la dicotomía ya establecida por el segundo párrafo del actual artículo 1.1 de la LRCSCVM, cuando establece que:
“En el caso de daños a las personas, de esta responsabilidad sólo quedará exonerado cuando pruebe que los daños fueron debidos a la culpa exclusiva del perjudicado o a fuerza mayor extraña a la conducción o al funcionamiento del vehículo; no se considerarán casos de fuerza mayor los defectos del vehículo ni la rotura o fallo de alguna de sus piezas o mecanismos.
En el caso de daños en los bienes, el conductor responderá frente a terceros cuando resulte civilmente responsable según lo establecido en los artículos 1.902 y siguientes del Código Civil, artículos 109 y siguientes del Código Penal, y según lo dispuesto en esta Ley.”
Este será uno de los primeros artículos llamados a la reforma tras la irrupción de esta clase de vehículos en las calles, si no el primero. En mi opinión, la ausencia de conductor y, por tanto, del elemento culpa, debe contribuir a superar el viejo desdoblamiento del sistema que el mismo realiza, unificándose todo ello en un sistema de responsabilidad objetiva más acorde a lo dispuesto en el primero de los párrafos reproducidos.
El hecho de prescindir del conductor nos lleva un escenario en el que el vehículo circulará de forma independiente, algo que, en teoría, debe ayudar a reducir la siniestralidad, no obstante, descartado el elemento culpa, no queda otra opción que la de establecer un sistema de responsabilidad objetiva, basado en el riesgo que implica cualquier posible defecto de seguridad en el vehículo. Y es un hecho innegable que la existencia de aparatos que de forma autónoma y sin intervención humana operen en la sociedad, conlleva un gran riesgo, consistente en que cualquier incidencia pueda traducirse en graves daños para las personas o las cosas. Es por ello que el fundamento de la responsabilidad pasará del sistema actual, sustentado en la culpa de quien conduce o el riesgo por la circulación, a un sistema basado de forma exclusiva en el riesgo en cuanto al defecto de seguridad del vehículo llamado a circular de forma completamente autónoma e independiente.
Ahora bien, el principio general de protección de la víctima hace preciso identificar a un nuevo responsable que sustituya al “conductor”, dado que la automatización de los vehículos conllevará la progresiva desaparición de tal sujeto. Así, quizá la expresión más idónea para referirse al nuevo responsable civil por la circulación de este tipo de vehículos sea el propietario o la persona que se sirva de él, tanto a título particular como con fines económicos, entrando a considerar, en este último supuesto, la responsabilidad del prestador de servicios. Desde este punto de vista, parece lógico imponer a la misma persona que se sirve del vehículo para su beneficio, la carga de responder por los daños y perjuicios que el propio vehículo cause en caso de producirse el indeseable resultado; menos lógico parece imputarle la responsabilidad prescindiendo de forma total de cualquier falta de diligencia que le fuese exigible, pero el interés más necesitado de protección, que no es otro que el de la víctima, así lo exige.
Esto también ha de responder al hecho de que no se puede hacer cargar a la propia víctima con la obligación de averiguar el motivo del siniestro de cara a dirigirse frente al responsable de la causa del mismo, sino que habrá de ponerse a su alcance una acción que permita dirigirse directamente frente al titular del vehículo que, más tarde, gozará de derecho de repetición frente al culpable de que el error se produjese.
Así las cosas, podremos encontrarnos con la aplicación concurrente de dos sistemas de responsabilidad previstos en nuestra legislación especial:
- La responsabilidad civil por daños derivados de la circulación de vehículos a motor, regulada en la LRCSCVM.
- La responsabilidad civil por daños causados por productos defectuosos, regulada en el TRLGDCU.
Como más adelante veremos, y al igual que ocurre a día de hoy, en virtud del aseguramiento obligatorio de esta clase de vehículos y la acción directa que la normativa pone a disposición del perjudicado, podrá reclamarse por éste al asegurador directamente, que será quien posteriormente se dirija frente al que pueda resultar responsable, si fuese imputable a otro sujeto el fallo que originó el siniestro.
Las causas de exoneración y/o moderación de la responsabilidad.
Existen unos supuestos tasados en los que, pese a la ocurrencia del siniestro, no será posible imputar al que se sirva del vehículo la obligación de responder por los daños ocasionados en el accidente. Existen otros supuestos en los que se podrá imputar esta responsabilidad, pero, en virtud de las circunstancias que hayan concurrido al caso, podrá ésta moderarse, es decir, reducirse de forma proporcional en atención a tales factores.
La culpa exclusiva de la víctima
Es preciso distinguir los conceptos de víctima y perjudicado, pues en muchas ocasiones no coincidirán tales calificativos respecto de una misma persona.
Así, la víctima tiene siempre participación directa en la mecánica del siniestro, y sufre en su persona las consecuencias lesivas del mismo. Si logra sobrevivir al siniestro, podremos decir que los conceptos de víctima y perjudicado coincidirán. El perjudicado, por su parte, es aquella persona que sufre un perjuicio derivado de la ocurrencia del siniestro, pero no tiene que coincidir necesariamente con la víctima. Son aquellos casos en que se reclame por el fallecimiento de una persona, o bien el dependiente económico reclame por el lucro cesante derivado de las graves lesiones que han restado a la persona de la cual dependía, a título de ejemplo.
Esta distinción es relevante, puesto que lo que la configuración que realiza de esta causa de exclusión el artículo 1.1 de la LRCSCVM antes reproducido, menciona al perjudicado y no a la víctima, coincidiendo nuestra opinión con la expuesta por BADILLO ARIAS cuando considera incorrecta tal cuestión por entender que en la mayoría de los casos en que no coinciden tales figuras, esto se debe a la total falta de participación del perjudicado en la mecánica del siniestro. No obstante, existen otros supuestos en los que el perjudicado a consecuencia del fallecimiento de la víctima puede incluso ser el conductor del vehículo, casos en los que existe muy heterogénea interpretación al respecto y que, con la entrada en juego de los vehículos autónomos, no volverán a suceder.
En este sentido, es importante aclarar que la culpa de la propia víctima en la causación del accidente ha de ser determinante en su materialización, derivada de una actuación de entidad suficiente como para entender que el accidente no se hubiese producido de ninguna forma si no se hubiese por el lesionado actuado de tal modo. La víctima, con su actuación, debe romper la relación de causalidad. Si no alcanza tal entidad, entendiendo que simultáneamente se dan la culpa de la víctima y el fallo en el vehículo, hablaremos de concurrencia de culpas y el efecto de la misma será moderador, pero nunca exonerador de la responsabilidad.
La fuerza mayor extraña al funcionamiento del vehículo.
En cuanto a la otra de las eximentes dispuestas en el mencionado artículo, se da una vuelta de tuerca a la eximente que el régimen general prevé en el ámbito de indemnización por daños y perjuicios establece bajo el nombre de fuerza mayor. La fuerza mayor se regula en el artículo 1105 del Código Civil, el cual dispone que nadie ha de responder por aquellos sucesos que además de no haber podido preverse, tampoco fuesen evitables.
Así, el artículo 1.1 de la LRCSCVM excluye de forma expresa de la concepción de fuerza mayor los defectos en los vehículos, así como igualmente los fallos o roturas de los mecanismos o piezas que integran los mismos, entre los que se encuentran el sistema operativo, los sensores, los sistemas de geolocalización… todo ello ha de entenderse incluso dentro del concepto de “caso fortuito” en este ámbito, de modo que no facultará para exonerar de responsabilidad de acuerdo con el sistema de responsabilidad que la norma establece. Así las cosas, en caso de fallo en las piezas que integren el vehículo, la aseguradora que haya de abonar la indemnización, más tarde habrá de dirigirse frente al que identifique como responsable directo del accidente. Es en este momento cuando cobrarán una importancia extraordinaria tanto el sistema de almacenamiento de datos del vehículo (lo que en la aviación se conoce comúnmente como “caja negra”) como el informe pericial que analice dónde se produjo el fallo.
El artículo define la eximente como “fuerza mayor extraña a la conducción”, entendiendo por tal aquel acontecimiento que pueda considerarse causa directa del daño y que sea ajeno a los riesgos que la circulación de vehículos trae consigo. Este acontecimiento tiene entidad suficiente como para entender que el mismo interrumpe la relación de causalidad entre el fallo del vehículo y las propias consecuencias lesivas derivadas del mismo, de modo que ya no es posible confirmar que éstas provengan de aquel, sino que más bien podremos concluir que la causa directa e inmediata del accidente fue dicho acontecimiento.
Ahora bien, ¿qué acontecimientos o sucesos pueden considerarse fuerza mayor extraña a la conducción? Pues aquellos que se sitúen fuera de lo que se pueden denominar los riesgos que el tránsito motorizado trae consigo, tales como actos de terrorismo, catástrofes naturales, disturbios o movilizaciones violentas, o determinados actos de terceros, entre otros.

La concurrencia de culpas.
Se denomina “concurrencia de culpas” la contribución simultánea por parte de responsable y víctima a la producción del daño, de modo que la persona que sufre el mismo resulta también responsable en cierta medida. Así, en la relación de causalidad entre el error de funcionamiento del vehículo y el daño sufrido por la víctima interfiere la propia conducta de esta última, a la cual también resultará imputable cierto grado de responsabilidad en la causación del daño.
Como situación posible, podría darse un fallo de los sistemas de reconocimiento de objetos y personas y, a la vez, esto traducirse en un atropello de un peatón que cruza la vía por un lugar no apto para ello.
El propio artículo 1 de la LRCSCVM, en su punto 2, trata este supuesto, para el cual determina como consecuencia principal la reducción de la indemnización que a su derecho proceda, estableciendo un límite máximo del 75%. De este modo, se establece una relación directamente proporcional entre la entidad de la participación de la víctima y la disminución del “quantum” indemnizatorio que a su favor ha de fijarse.
El primer inciso dispone expresamente que lo anterior ha de predicarse única y exclusivamente en relación a la “víctima capaz de culpa civil”. Sin perjuicio de lo anterior, el segundo inciso profundiza acerca de esta cuestión, descartando la moderación de la responsabilidad siempre que la víctima culpable sea menor de catorce años, o bien sufra un “menoscabo físico, intelectual, sensorial u orgánico que les prive de capacidad de culpa civil”. Se pretende así dotar de una mayor protección a la víctima menor de catorce años o mayor con cierto grado de discapacidad que afecte a su autogobierno.
La excepción busca proteger única y exclusivamente a la víctima, y de ahí se explica el hecho de que la excepción no abarque supuestos de fallecimiento, sino única y exclusivamente situaciones de secuelas y lesiones temporales, puesto que, muerta la víctima, se beneficiaría injustificadamente a los encargados de ella, perjudicados a consecuencia del siniestro. La protección de estos sujetos también es la causa que conlleva a que se declare inmunes al derecho de repetición a sus padres, tutores o personas que se encarguen de ellas, pues el impacto económico negativo desprendido del ejercicio del derecho de repetición le afectará a ella de forma indirecta.
El aseguramiento tras la objetivación de la responsabilidad.
Si existe seguridad sobre algo en esta materia, es sobre la subsistencia de la obligatoriedad de aseguramiento (valga la redundancia) de esta clase de vehículos. Dado que hemos visto que no son pocos los riesgos que se pueden materializar en un siniestro, seguirá exigiéndose el seguro obligatorio de automóviles; exigencia que se acomodará a lo establecido tanto en la LRCSCVM y se llevará a cabo tal y como indica la Ley 50/1980, de 8 de octubre, de Contrato de Seguro (en adelante, LCS)., aunque con las modificaciones que en su momento acaben implantándose.
En su virtud, tal y como dispone el artículo 2 de la LRCSCVM, toda persona estará obligada a concertar un contrato de seguro por cada vehículo de que sea titular, con la finalidad de tener cubiertos los daños que, de materializarse el siniestro, hubiere que reparar. El precepto también admite que sea “cualquier persona que tenga interés en el aseguramiento” del vehículo, concepto que abarcaría al que anteriormente hemos denominado como “el que se sirva de él”.
Lo que resulta más discutible, habida cuenta de que la suscripción de estos seguros llevará consigo la aparición de un gran número de indemnizaciones a satisfacer por el asegurador sin que pueda predicarse responsabilidad alguna por parte del tomador/asegurado, es en qué medida dicho seguro atiende a las notas características de los .denominados “seguros de responsabilidad civil”. El artículo 73 de la LCS nos explica qué define dicho concepto:
“Por el seguro de responsabilidad civil el asegurador se obliga, dentro de los límites establecidos en la Ley y en el contrato, a cubrir el riesgo del nacimiento a cargo del asegurado de la obligación de indemnizar a un tercero los daños y perjuicios causados por un hecho previsto en el contrato de cuyas consecuencias sea civilmente responsable el asegurado, conforme a derecho.”

Considero que la vuelta de tuerca que se atisba en el horizonte en cuanto a la mayor objetivación de una responsabilidad ya de por sí objetivada, junto a la desaparición total del factor “culpa” en la práctica totalidad de los incidentes, supondrá que en muchos casos no podamos hablar de un siniestro “de cuyas consecuencias fuese civilmente responsable el asegurado” y, aun así, el seguro haya de cubrir los daños causados. El criterio de atribución de la responsabilidad basado en el riesgo por defecto de seguridad en el vehículo responsable dará lugar a que, por el mero hecho de producirse el siniestro, nazca el legítimo derecho por parte de los lesionados a ejercitar sus pretensiones indemnizatorias frente al titular del mismo, de modo que se asemejará más al seguro previsto para la responsabilidad derivada del tráfico aéreo que al que hoy conocemos para el tránsito rodado.
Los daños causados por el tráfico aéreo, al igual que los causados por energía nuclear, son los únicos garantizados bajo lo que se considera un sistema de responsabilidad civil objetiva propiamente dicho. Muy difícilmente se exonerarán de indemnizar los que resulten responsables. Es un sistema que puede aplicarse perfectamente al ámbito de la automoción autónoma, el cual podría acabar asemejándose más a un seguro de accidentes que al definido anteriormente.
Se entiende por “seguro de accidentes” aquel por el que el asegurador cubre los riesgos que se deriven en caso de “accidente”, entendido tal por un acontecimiento que quepa tildar de violento, repentino y externo, y que afecte a la integridad física del asegurado, de modo que produzcan la muerte o incapacidad permanente de éste. Lo primero que nos choca es que el artículo 100 de la LCS, llamado a definir esta clase de aseguramiento, se refiere única y exclusivamente al asegurado, y no a los terceros que puedan resultar víctimas, no obstante, son variables que podrían ser objeto de debate en sede de negociación contractual. En segundo lugar, el hecho de que exclusivamente cubra muerte e incapacidades parciales, tampoco convence.
En conclusión, el seguro que habrán de suscribir los vehículos autónomos será un seguro en que la entidad aseguradora se obligue, por el mero hecho de producirse el siniestro, a cubrir los daños causados tanto a las personas que vayan dentro del vehículo como fuera del mismo, en aras de garantizar los derechos de las víctimas, quedando exonerada solo en caso de culpa exclusiva de la víctima o fuerza mayor extraña a la circulación del vehículo.
Y comoquiera que surgirán en la práctica ocasiones en las que resulte imputable el fallo que produjo el accidente a otros agentes ajenos al mismo, y en concreto, viendo el supuesto de Uber, al productor o al servicio de movilidad, cobrará más relevancia si cabe el derecho de repetición que la legislación vigente otorga a la aseguradora pagadora.
Es por ello que, presumiblemente en la mayoría de supuestos, la reparación del daño de los perjudicados no supondrá sino el inicio de una segunda reclamación, en el que la aseguradora pagadora exija al responsable real el reintegro de lo abonado, al haberse subrogado en la posición de los mismos. Por ello, resulta probable un incremento de los litigios consistentes en el ejercicio del derecho de repetición por parte de la aseguradora que cubra el riesgo, frente al fabricante o aquel al que se le pueda imputar de forma directa y clara la producción del fallo que originó el accidente.
Conclusiones.
1º.- En los próximos años seremos testigos de lo que ya se conoce como la Cuarta Revolución Industrial, la cual se materializará en el campo de los vehículos a motor, muy probablemente, de la mano de tres modificaciones sustanciales en el modo de concebir el transporte que tenemos hoy en día: (1) Se superará el empleo de combustibles fósiles y se terminarán de implantar las energías renovables, aunque lo harán de forma gradual, habida cuenta de los intereses económicos en juego; (2) Igualmente se superará el concepto de vehículo como bien privativo, perdiendo un terreno que ganarán las empresas de servicios de movilidad; y (3) Se implantará el vehículo autónomo en nuestras carreteras, el cual coexistirá durante un periodo transitorio con los vehículos actuales, que de forma progresiva quedarán relegados a un segundo plano.
2º.- Será preciso, a la vista del cambio de modelo social que todo lo anterior implica, una adaptación normativa exhaustiva, desde la Convención de Viena sobre circulación por carretera hasta el Real Decreto Legislativo 8/2004, de 29 de octubre, por el que se aprueba el Texto Refundido de la Ley sobre Responsabilidad Civil y Seguro en la Circulación de Vehículos a Motor y normas relacionadas, habida cuenta del gran cambio que supone la ausencia de la persona del conductor en la relación de responsabilidad civil por daños causados en accidentes de circulación. Igualmente, habrá de regularse la responsabilidad civil del propietario o la persona, física o jurídica, que se sirva del vehículo, en función del beneficio que el mismo reporta, a falta de un conductor al que imputar la culpa.
3º.- Dejar la conducción en manos de los denominados Sistemas de Transporte Inteligente conllevará una nueva vuelta de tuerca a la objetivación que lleva años afectando progresivamente a la responsabilidad civil en cuanto al ámbito de la circulación se refiere, de modo que se articulará un sistema de responsabilidad a medio camino entre ésta y la prevista para productos defectuosos.
4º.- Las entidades aseguradoras deberán adaptarse a esta nueva realidad que, de un lado, conllevará la reducción significativa de siniestros derivados del tránsito rodado, aunque de otro, supondrá la aparición de nuevos riesgos y una responsabilidad civil de la que difícilmente se exonerará. Los seguros de este ramo se asemejarán al seguro de accidentes dada la objetivación a la que antes hemos aludido.
Si te ha gustado este artículo, nos encantaría que lo comentases o lo compartieras. Si te has quedado con alguna duda, puedes hacérnosla llegar al formulario de contacto, intentaremos darle solución de la forma más ágil.
Bibliografía.
Artículos y publicaciones.
“European Platform on Mobility Management (EPOMM)”.
“Coche Autónomo, seguridad vial y formación de conductores”, trabajo realizado por el Instituto de Tránsito y Seguridad Viaria INTRAS Grupo de Investigación de la Universidad de Valencia, año 2017.
“De 0 a 5: cuáles son los diferentes niveles de conducción autónoma, a fondo”, artículo de Ibáñez para el portal Xakata, publicado el 18 de abril de 2017.
“El coche autónomo. Los conductores, dispuestos a ceder la conducción a la tecnología”, trabajo realizado por el “Observatorio Cetelem Auto”, año 2016.
“Historia del automóvil”, trabajo realizado por D. Miguel Ángel Condori M. y publicado en Monografías.com.
“Los conductores: principios fundamentales del tráfico”, publicación de la Unidad de Intervención Educativa, Subdirección Gral. de Intervención y Políticas Viales, Dirección General de Tráfico, Ministerio del Interior, Gobierno de España, coordinador: D. Perfecto Sánchez Pérez, año 2014.
“Nils Bohlin, ingeniero salvador de vidas”, artículo publicado en el portal web www.circulaseguro.com.
“Por control remoto: así era el coche sin conductor en tiempos de tu abuela”, artículo publicado por Dª. Cristina Sánchez el 31 de julio de 2016 para El Confidencial.
“Sistemas de transporte inteligente”, publicación de la página relativa al Transporte Terrestre, en la web del Ministerio de Fomento del Gobierno de España.
Doctrina y jurisprudencia.
BADILLO ARIAS, J.A., “La conceptualización del hecho de la circulación en la responsabilidad civil automovilística y el seguro”, tesis doctoral, Departamento de Derecho Privado de la Facultad de Derecho de la Universidad Carlos III de Madrid.
BADILLO ARIAS, J.A., “GPS: Derecho de la circulación”, 2º Edición, Editorial Tirant lo Blanch, año 2018.
LÓPEZ Y GARCÍA DE LA SERRANA, J., “El derecho de repetición del asegurador”, artículo doctrinal de la web de la Asociación Española de Abogados Especializados en Responsabilidad Civil y Seguro.
Sentencia del Tribunal Supremo nº 1161/2016, de 18 de marzo, Sala de lo Civil, Pte. Excmo. D. Ángel Fernando Pantaleón Prieto.




¿Alguna duda? Deja un comentario